
Baccalauréat S Antilles Guyane 18 juin 2019 - Correction Exercice 2
Correction de l'exercice 2 (5 points)
Les deux parties de cet exercice sont indépendantes.
Alex et Élisa, deux pilotes de drones, s'entraînent sur un terrain constitué d'une partie plane qui est bordée par un obstacle. On considère un repère orthonormé $\left(\text{O},~\vec{i},~\vec{j},~\vec{k}\right)$ , une unité correspondant à dix mètres. Pour modéliser le relief de la zone, on définit six points O, P, Q, T, U et V par leurs coordonnées dans ce repère : \[\text{O}(0~;~0~;~0), \text{P}(0~;~10~;~0), \text{Q}(0~;~11~;~1), \text{T}(10~;~11~;~1), \text{U}(10~;~10~;~0) \text{et V}(10~;~0~;~0)\] La partie plane est délimitée par le rectangle OPUV et l'obstacle par le rectangle PQTU. 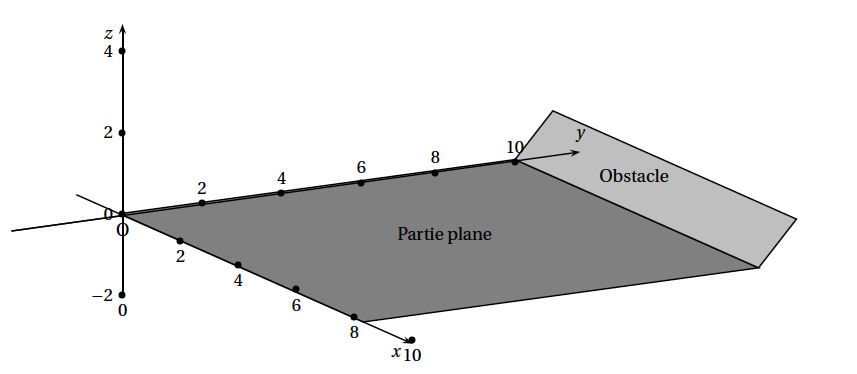
Les deux drones sont assimilables à deux points et on suppose qu'ils suivent des trajectoires rectilignes:
- le drone d'Alex suit la trajectoire portée par la droite (AB) avec A$(2~;~4~;~0,25)$ et B$(2~;~6~;~0,75)$ ;
- le drone d'Élisa suit la trajectoire portée par la droite (CD) avec C$(4~;~6~;~0,25)$ et D$(2~;~6~;~0,25)$.
Partie A : Étude de la trajectoire du drone d'Alex
- Déterminer une représentation paramétrique de la droite (AB). On a $\vec{AB}(0;2;0,5)$.
-
- Justifier que le vecteur $\vec{n}(0~;~1~;~-1)$ est un vecteur normal au plan (PQU). On a $\vec{PQ}(0;1;1)$ et $\vec{PU}(10;0;0)$.
- En déduire une équation cartésienne du plan (PQU). Une équation cartésienne du plan $(PQU)$ est donc de la forme $y-z+d=0$.
Ces deux vecteurs sont clairement non colinéaires.
D’une part $\vec{n}.\vec{PQ}=0+1-1=0$;
D’autre part $\vec{n}.\vec{PU}=0+0+0=0$.
Le vecteur $\vec{n}$ est donc orthogonal à deux vecteurs non colinéaires du plan $(PQU)$.
Le vecteur $\vec{n}$ est par conséquent normal au plan $(PQU)$.
$\quad$
Le point $P(0;10;0)$ appartient à ce plan.
Donc $10-0+d=0 \iff d=-10$.
Une équation cartésienne du plan $(PQU)$ est donc $$y-z-10=0$$
$\quad$ - Démontrer que la droite (AB) et le plan (PQU) sont sécants au point I de coordonnées $\left(21~;~\dfrac{3}{3}~;~\dfrac{7}{3}\right)$. Montrons que le point $I$ appartient à la droite $(AB)$.
- Expliquer pourquoi, en suivant cette trajectoire, le drone d'Alex ne rencontre pas l'obstacle. On a $\dfrac{37}{3}\approx 12,33 > 11$ (deuxième coordonnée des points $Q$ et $T$).
Une représentation paramétrique de la droite $(AB)$ est donc : $\begin{cases} x=2\\y=4+2t\\z=0,25+0,5t\end{cases} \quad, t\in\mathbb R$.
$\quad$
Résolvons pour cela l’équation :
$4+2t=\dfrac{37}{3} \iff 2t=\dfrac{25}{3} \iff t=\dfrac{25}{6}$
De plus $0,25+0,5\times \dfrac{25}{6}=\dfrac{1}{4}+\dfrac{25}{12}=\dfrac{7}{3}$
Le point $I$ appartient donc à la droite $(AB)$.
$\quad$
$\dfrac{37}{3}-\dfrac{7}{3}-10=\dfrac{30}{3}-10=10-10=0$. Le point $I$ appartient également au plan $(PQU)$.
$\quad$
De plus $\vec{AB}(0;2;0,5)$ et $\vec{n}(0;1;-1)$ ne sont pas colinéaires.
La droite $(AB)$ et le plan $(PQU)$ sont donc sécants au point $I$ de coordonnées $\left(2;\dfrac{37}{3};\dfrac{7}{3}\right)$.
$\quad$
En suivant cette trajectoire, le drone d’Alex ne rencontre pas l’obstacle.
Remarque : $\dfrac{7}{3}>1$. On pouvait donc également dire que la côte du point $I$ était supérieure à celle des points $Q$ et $T$.
$\quad$
Partie B : Distance minimale entre les deux trajectoires
Pour éviter une collision entre leurs deux appareils, Alex et Élisa imposent une distance minimale de 4 mètres entre les trajectoires de leurs drones. L'objectif de cette partie est de vérifier si cette consigne est respectée. Pour cela, on considère un point $M$ de la droite (AB) et un point $N$ de la droite (CD). Il existe alors deux réels $a$ et $b$ tels que $\vec{\text{A}M} = a \vec{\text{AB}}$ et $\vec{\text{C}N} = b \vec{\text{CD}}$. On s'intéresse donc à la distance $MN$.
- Démontrer que les coordonnées du vecteur $\vec{MN}$ sont $(2 - 2b~;~2 - 2a~;~- 0,5a)$. On a $\vec{AM}(0;2a;0,5a)$ et $\vec{CD}(-2;0;0)$
- On admet que les droites (AB) et (CD) ne sont pas coplanaires. On admet également que la distance $MN$ est minimale lorsque la droite $(MN)$ est perpendiculaire à la fois à la droite (AB) et à la droite (CD). Démontrer alors que la distance $MN$ est minimale lorsque $a = \frac{16}{17}$ et $b = 1$. On a $\vec{MN}.\vec{CD}=-2(2-2b)$ et $\vec{MN}.\vec{AB}=2(2-2a)+0,5(-0,5a)$
- En déduire la valeur minimale de la distance $MN$ puis conclure. Les coordonnées du vecteur $\vec{MN}$ sont donc $\left(0;\dfrac{2}{17};-\dfrac{8}{17}\right)$.
Donc $\vec{CN}(-2b;0;0)$
De plus $\vec{AC}(2;2;0)$.
Or $\vec{MN}=\vec{MA}+\vec{AC}+\vec{CN}$.
Les coordonnées du vecteur $\vec{MN}$ sont donc $(2-2b;-2a+2;-0,5a)$.
$\quad$
La droite $(MN)$ est perpendiculaire à la fois à la droite $(AB)$ et à la droite $(CD)$
$\begin{align*}&\iff \begin{cases} -2(2-2b)=0\\2(2-2a)+0,5(-0,5a)=0 \end{cases}\\
&\iff \begin{cases} 2-2b=0\\4-4a-0,25a=0\end{cases} \\
&\iff \begin{cases} b=1\\4,25a=4\end{cases}\\
&\iff \begin{cases} b=1\\a=\dfrac{16}{17}\end{cases}\end{align*}$
La distance est donc minimale lorsque $a=\dfrac{16}{17}$ et $b=1$.
$\quad$
Ainsi $MN=\sqrt{0^2+\left(\dfrac{2}{17}\right)^2+\left(-\dfrac {8}{17}\right)^2}=\sqrt{\dfrac{4}{17}}=\dfrac{2}{\sqrt{17}}$.
Or $\dfrac{2}{\sqrt{17}}\approx 0,49$
Ainsi la distance minimale qui sépare les deux drones est environ égale à $4,9$ m, qui est bien supérieure à la distance de $4$ m imposée. Il n’y aura pas de collision entre les deux drones.
$\quad$
- Vues: 92113